|
X3 PC-Unit
SV2 Anschluss für FTDI Kabel, falls man dies statt der PC-Unit verwendet
SV4 direkt angeschlossene Sensoren
SV5 direkt angeschlossene Sensoren
SV1 Weit entfernte Sensoren
SV3 Weit entfernte Sensoren
X4 Bahnanschluss
JP1 BB/CU Anschluss
JP3 Bahn feedback
JP2 Chaos- & Freigabetasten
X1, X2 Netzteil
|
PELWMSD ist kein Spielzeug, die zur Verfügung gestellte Leistung kann im Fehlerfall zur Überhitzung von Bauteilen führen. Im Extremfall sogar zu Bränden führen. Die nachfolgende Beschreibung wurde mit größter Sorgfalt erstellt. Trotzdem erfolgt der Nachbau auf eigene Gefahr und wir übernehmen weder Verantwortung noch Haftung für eventuell entstehende Schäden jedweder Art. Worum geht 's ? November 2010. PELWMSD, ist eine Schwesterschaltung der ELWMSD, der eierlegenden Wollmilchsau. Sie hat nicht ganz so viele Funktionen, wie die ELWMSD und beschränkt sich auf die Unterstützung von Carrera Digital Systemen, bietet aber dafür Einsatzmöglichkeiten, die eine Veränderung der Bahndaten benötigen. PELWMSD wird zwischen BB bzw. CU und die Schiene geschaltet. Dadurch ist sie nicht nur in der Lage, die zur Verfügung stehende elektrische Leistung zu erhöhen, sondern auch dazu, die Bahndaten zu verändern. Einsatz PELWMSD lässt sich mit der CU und der BB verwenden. Die Features unterscheiden sich je nachdem ob PELWMSD mit der CU oder BB eingesetzt wird. Manche Features werden über die serielle Schnittstelle des Mikrocontrollers ausgewählt. Dies kann mit Hilfe eines Terminalprogrammes geschehen oder durch speziell angepasste Software. Der Anschluss der seriellen Schnittstelle erfolgt über die PC-Unit oder einen Adapter, wie auf dieser Seite vorgestellt. Wenn immer von PC-Unit gesprochen wird, so bedeutet das PC-Unit oder kompatibler Adapter. Die PC-Unit findet zur Einstellung von Parametern oder Modi der PELWMSD und zur Übertragung der Daten für die Runden und Zeitmessung Verwendung. Zum Einstellen von Modi und Parametern muss sie mit der PELWMSD verbunden sein. Sind die Änderungen vollzogen, kann die PC-Unit ggf. entfernt werden. Für die Zeitmessung und Rundenzählung mit einem Computer kann die PC-Unit mit PELWMSD, dem Carrera Rundenzähler oder der Control Unit verbunden werden. An welches Gerät man die PC-Unit anschließt hat Auswirkungen auf Eigenschaften und Betriebsmodi. In Verbindung mit der CU macht es keinen Sinn die PC-Unit für die Zeit- und Rundenmessung mit PELWMSD zu verbinden. Für die Änderung von Einstellungen hingegen schon. PELWMSD verwendet bei Anschluss der PC-Unit das selbe Protokoll wie die CU. Für eine Zeitmessung und Rundenzählung über PELWMSD wird eine Software benötigt, die die CU unterstützt.
Anmerkungen zu einigen Features Durch 5 faches schnelles Clicken einer Weichentaste oder der gesondert angeschlossenen Chaostaste wird eine Gelbphase ausgelöst. In der Gelbphase wird die Geschwindigkeit der Fahrergesteuerten Fahrzeuge auf einen bestimmten Geschwindigkeitswert limitiert. Dieser Wert lässt sich einstellen. Ist das Limit 0, so bleiben alle Fahrzeuge auch die Ghostfahrzeuge stehen. Ist das Limit über 0, so fährt auch das Pacecar los. Das Geschwindigkeitslimit hat keinen Einfluss auf das Ghostcar - außer bei einer Einstellung von 0, dann bleibt auch das Ghostcar stehen. Die Gelbphase wird freigegeben, wenn entweder der Freigabetaster gedrückt wird oder ein 5-fach Click erfolgt. Der 5 fach Click kann allerdings erst 5 Sekunden nach dem Beginn der Gelbphase eingesetzt werden. Nach der Freigabe dauert es noch eine einstellbare Zeitspanne, bis das Rennen fortgesetzt wird. Während der Gelbphase werden Runden normal gezählt und es kann auch getankt werden. PELWMSD analysiert beim Einschalten die Stellung des Freigabe und Chaostasters. dadurch ist es möglich sowohl Öffner als auch Schließer für diese tasten zu verwenden. Es kann zusätzlich ein Led zur Anzeige der Gelbphase angeschlossen werden. Im Normalfall ist sie aus. Solange die Chaostaste gedrückt wird, leuchtet sie. Ist die Gelbphase aktiv, aber weder Freigabe, noch Chaostaste gedrückt, so blinkt sie langsam. Wurde die Gelbphase freigegeben so blinkt sie schnell. Erlischt sie wird das Rennen normal fortgesetzt. Die Langsamfahrstrecke ist eine Möglichkeit in bestimmten Streckenabschitten ein Geschwindigkeitslimit zu verhängen. Eigentlich ist es mehr eine Langsamfahrphase, denn sie betrifft nur ein Auto und beginnt mit Überfahren eines als Langsamfahrsensor markierten Sensors und endet beim Überfahren eines nicht markierten Sensors. Zusätzlich können alle Pitlaneadapter zum Ein- oder Abschalten der Langsamfahrphase verwendet werden. Die Höchstgeschwindigkeit während der Langsamfahrphase ist einstellbar. Im Betrieb mit der CU, fährt das Auto langsamer, obwohl die CU denkt es fährt mit der Reglereinstellung. Das heißt, auch wenn das Auto in der Boxengasse langsam fährt, kann wegen der Reglerstellung trotzdem der Tankvorgang verhindert werden. Im Betrieb mit der BB, hingegen stimmen Fahrgeschwindigkeit und interne Geschwindigkeit überein und somit kann es nicht zu einem Abbrechen des Tankvorgangs kommen, wenn man die Geschwindigkeit entsprechend niedrig einstellt. Beim Einschalten ist darauf zu achten, dass zuerst PELWMSD eingeschaltet wird. Erst nach ca. 2 Sekunden die BB bzw. CU Einschalten. Hält man sich nicht daran, so kann es vorkommen, dass eventuell vorhandene Pitlaneadapter nicht korrekt erkannt werden.
Hardware
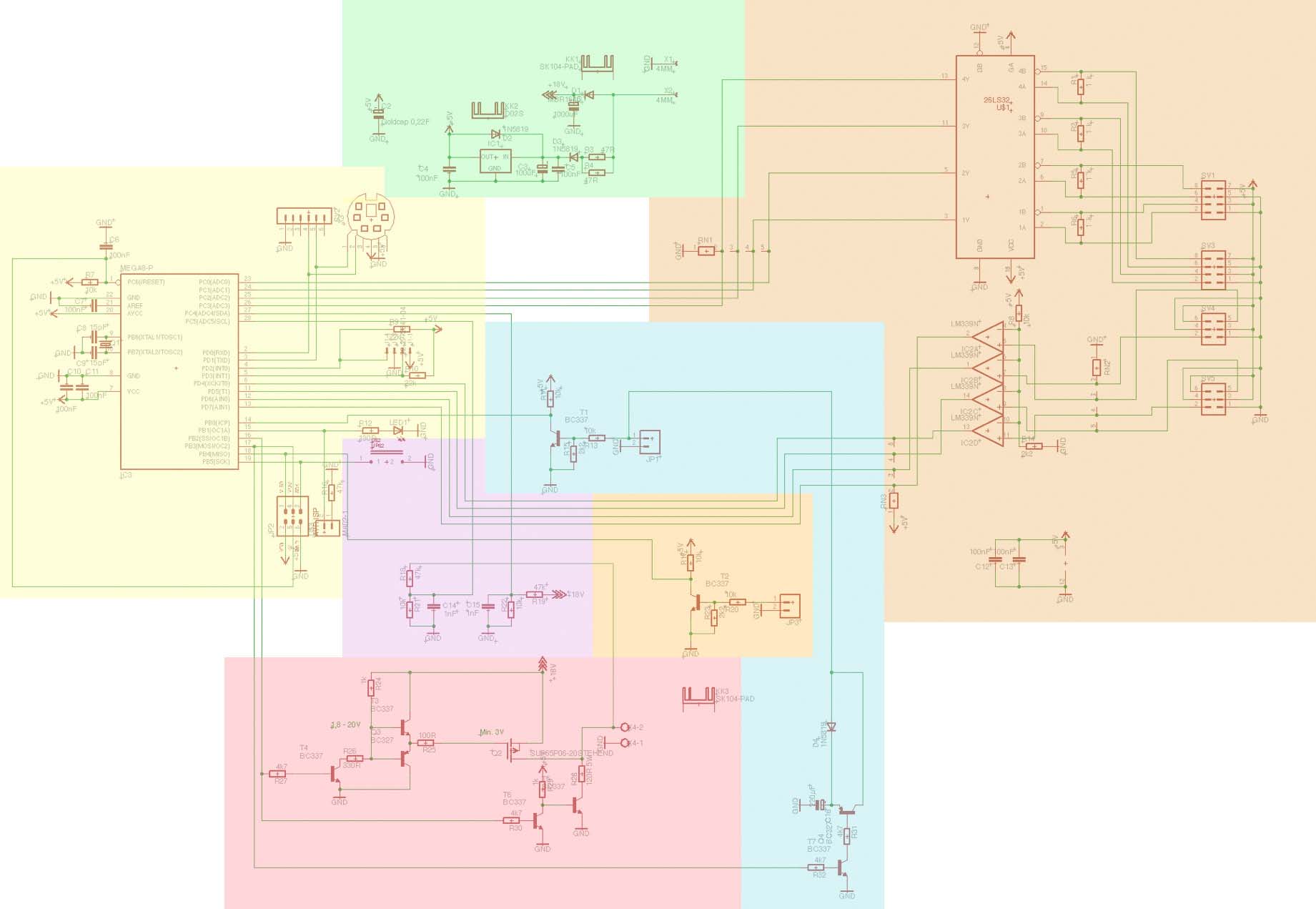
Der Kern der PELWMSD ist der gelb hinterlegte Teil. Dazu gehören auch der Anschluss für die Chaos- und Freigabetasten, Programmierinterface, Betriebsanzeige Led und der Anschluss für die PC-Unit. Der braun hinterlegte Teil sind die Interfaces für die Sensoren. Im unteren Bereich die Komparatoren für den direkten Anschluss von IR Transistoren, der obere Bereich für den Anschluss von Sensoren über Differentialtreiber. Diese sind auch für den Anschluss von weiter entfernten Sensoren geeignet. Benötigt man keine Sensoren oder nur eine Art von Sensoren, so kann man den jeweiligen anderen Teil unbestückt lassen. Der blaue Bereich dient dem Lesen und Schreiben von Daten von bzw. zur Blackbox. Der grüne Teil versorgt die Schaltung mit Spannung. Sie wir aus einem externen Gleichspannungs-Netzteil mit mehr als 12V versorgt. Die Treiber des Bahninterfaces vertragen über 20A. Die Beschränkung liegt weniger in der Stromfestigkeit als der aus dem Stromfluss resultierenden Wärmeentwicklung. Der rote Teil stellt das Bahninterface dar. Von hier werden die Datenpakete auf die Bahn geschickt. Der lila Teil enthält die Kurzschluss- und Temperaturüberwachung. Der orangene Teil dient dem Einlesen von Daten von der Bahn z.B. vom Pitlaneadapter und der Analogmodus Erkennung. Elektronische Bauteile Alle nachfolgenden Artikelnummern und Preise beziehen sich auf Artikel der Fa. Reichelt bei Weblegung . Ich habe keine Verbindung zu dieser Firma. Ich verwende sie nur als Beispiel. Die Bauteile sind auch bei anderen Anbietern, wie Segor oder Conrad erhältlich. Will man die Platine in ein vorgefertigtes Gehäuse einbauen, so kann es sinnvoll sein, statt der angegebenen Buchsentypen, die für die Platinenmontage vorgesehen sind, andere Typen zu verwenden, die mit Kabeln mit der Platine verbunden werden. Neben Mikrocontroller, Platine und Steckverbindern (außer den 4 mm, dem Bahnanschluss und MinDin6 Buchsen) benötigt man:
Die preiswerteste Variante an Steckverbindern sind Stift- und Federleisten. Das Raster muss 2,54 mm betragen. Es gibt sie gewinkelt und gerade in langen "Streifen" von denen man sich Stücke entsprechender Länge abschneidet. Teurer aber komfortabler sind Platinensteckverbinder. Die Stiftleisten haben meist eine Plastik-Halbwanne, die auch als Verpolungsschutz dient und die Buchsen sind schon mit Kabeln vorkonfektioniert. Möchte man die Kabel zur Bahn nicht verlöten, so bietet sich eine Schraubklemme im Raster 5mm oder 5,08mm an. Bestückung
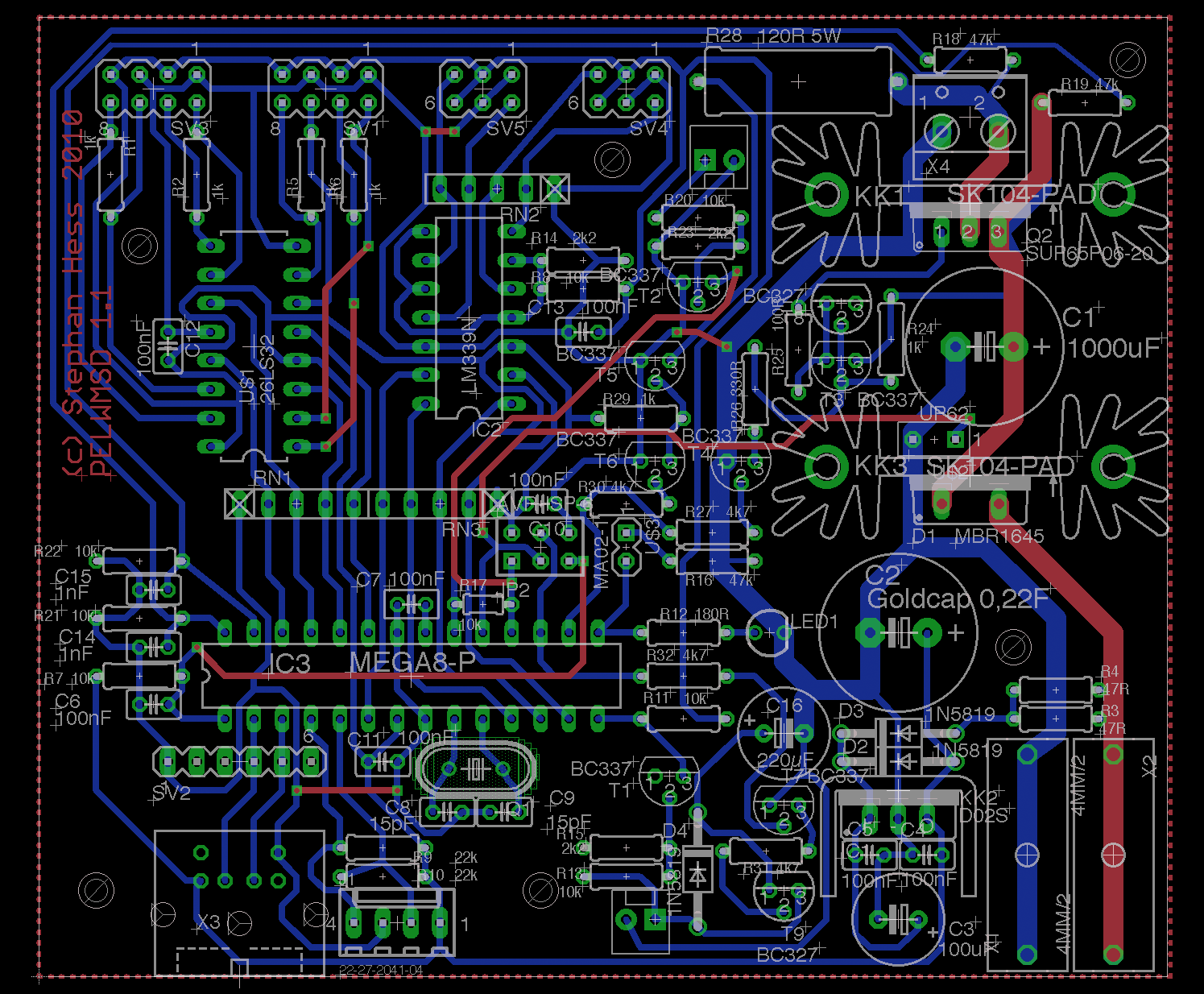
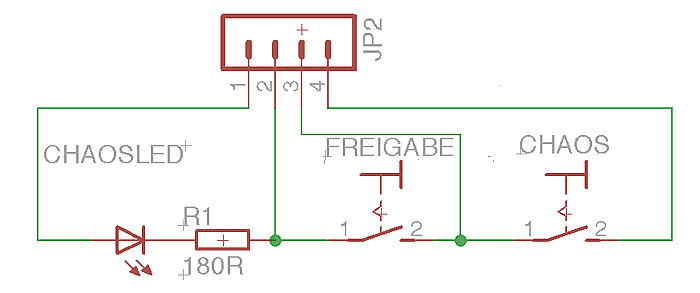
Man beginnt mit den mechanischen (Fassungen, Stecker) und passiven Bauelementen (Widerstände Rx, Widerstands Netzwerke RNx, Kondensatoren Cx). Ich bestücke für gewöhnlich in aufsteigender Bauhöhe, d.h. flache Bauteile zuerst. Und trotz der "Mechanische und Passive zuerst" Regel bestücke ich die Steckerleisten oft als letzte, da sie sonst manchmal einfach im Weg sind. Die Elkos C1 bis C3 müssen richtig herum eingebaut werden. C2 wird als Goldcap bezeichnet, das ist aber falsch. Es handelt sich um einen Standard Elko. Alle Elkos haben eine Markierung für den Minuspol (Streifen mit - Zeichen) auf dem Bestückungsplan ist allerdings der Pluspol vermerkt. Mit Ausnahme von R17 werden alle Widerstände liegend eingebaut. Man kann R17 zwar mit etwas Kreativität auch liegend einbauen, aber ihn stehend einzubauen ist einfacher. Die Widerstandsnetzwerke müssen ebenfalls in einer vorgegebenen Richtung eingesetzt werden. Auf dem Bestückungsplan ist der Pin 1 mit einer kleinen 1 gekennzeichnet auf dem Bauteil mit einem Punkt. RN1 wird nicht bestückt. Nun folgen die restlichen Bauteile. Bei den Dioden Dx ist die Kathode sowohl im Bestückungsplan als auch auf dem Bauteil durch eine Linie gekennzeichnet. Die Transistoren Tx lassen sich eigentlich nur in einer Richtung einfach einsetzen. U$1, IC2 und IC3 werden in der Richtung der Halbmondförmigen Einbuchtung auf Plan und Bauteil eingesetzt. Die Einbaurichtung des Quarzes Q1 ist egal. Diode D1, Fet Q2 und Spannungsregler IC1, müssen entsprechend des Bestückungsplans eingesetzt werden. Es empfiehlt sich sie schon vor dem Einsetzen lose mit dem Kühlkörper zu verbinden und nach dem Einlöten fest mit dem Kühlkörper zu verschrauben (M3 und Mutter). Spannungsversorgung Die Spannungsversorgung erfolgt über die beiden 4mm Buchsen. Die BB/CU wird getrennt über ein normales Carrera Netzteil versorgt. Als Netzteil für PELWMSD eignet sich jedes Gleichspannungsnetzteil - ein einstellbares Labornetzteil bietet sich an. PELWMSD verträgt bis zu 16A, allerdings schließt die Erwärmung der Bauteile einem Dauerbetrieb mit 16A aus. Im normalen Betrieb sollten die Kühlkörper nicht mehr als handwarm werden. Wenn der Temperatursensor 70° registriert schaltet PELWMSD die Endstufe solange ab, bis die Temperatur unter 40° gesunken ist. Bei hohen Strömen ist es wichtig, dass die Verbindungen möglichst kleine Widerstände aufweisen. Deshalb ist es wichtig, Kabel mit einem Querschnitt von zumindest 1,5mm2 zu verwenden. Und die Verbindungen zu den Steckern muss so gut wie möglich sein. Chaos- und Freigabetaster. Obwohl in der Überschrift Taster steht, kann man Taster oder Schalter verwenden. Zusätzlich kann man noch eine Led anschließen um den Zustand der Taster anzuzeigen. Beim Drücken des Chaostasters wird das Rennen abgebrochen bzw. die Gelbphase eingeläutet. Solange die Taste gedrückt wird oder falls man einen Chaosschalter hat, dieser eingeschaltet ist, leuchtet die Chaos Led. Wird die Taste losgelassen bzw. der Schalter wieder ausgeschaltet, so blinkt die Led langsam. Das ist das Signal dafür, dass das Rennen mit dem Freigabetaster wieder freigegeben werden kann. Drückt man nun den Freigabetaster, so beginnt mit dem Loslassen des Tasters, die Led schnell zu blinken und nach ca. 10 Sekunden wird das Rennen freigegeben. dabei gibt es keine Frühstartkontrolle, man kann also schon Vollgas geben bevor das Rennen freigegeben wird. Chaostaster, Freigabetaster und Chaos Led werden an JP2 angeschlossen. Der Chaostaster so, dass er Masse (Pin3) auf den Chaostastereingang (Pin4) legt, der Freigabetaster so, dass er Masse (Pin3) auf den Freigabetastereingang legt (Pin2). Die Kathode (Minuspol, kurzes Bein) der Chaos Led wird über einen 180 Ohm Widerstand mit dem Freigabetastereingang verbunden - die Anode (Pluspol, langes Bein) mit 5V (Pin1).
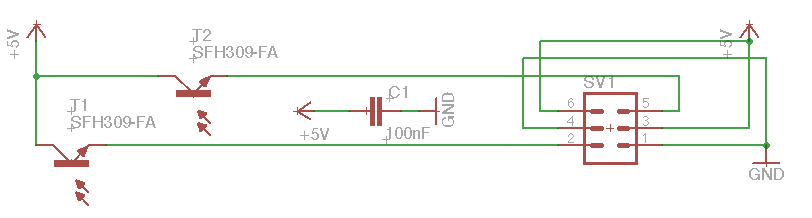
Sensoren Wie schon mehrfach erwähnt unterstützt PELWMSD 8 Sensoren - 4 für den direkten Anschluss und 4 für den entfernten Anschluss. Für den direkten Anschluss benötigt man nur die Sensoren, der Rest befindet sich schon auf der Platine von PELWMSD. Die maximal verwendbare Entfernung dieser Sensoren lässt sich nicht genaus vorhersagen. Wenn es sporadische Fehlzählungen gibt und das Kabel zu solch einem Sensor mehr als 50 cm lang ist, sollte man einen Sensor für den entfernten Anschluss ausprobieren. Es gibt aber keinen Grund warum ein direkter Sensor nicht auch bei 1m Kabellänge funktionieren kann. Bei den Sensoren handelt es sich um SFH309-FA Fototransistoren. Das kurze Bein ist der Kollektor und wird mit 5V verbunden. Das lange Bein, der Emitter, wird mit dem Sensoreingang verbunden. Das geschieht über die Stecker SV4 und SV5. Jeder Stecker hat Anschlüsse für 2 Sensoren. Pin 2 (Eingang Sensor 1) und Pin 3 (5V) und Pin 5 (Eingang Sensor 2) und Pin 6 (5V).
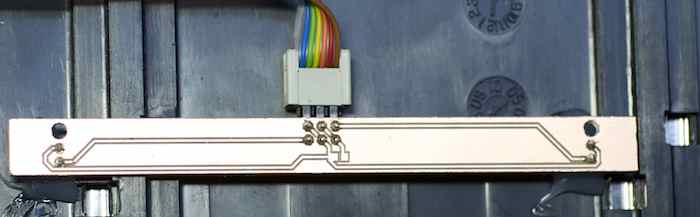
Des einfachen Aufbaus halber, habe ich mir eine Platine gemacht, die zwei Sensoren und einen Stecker trägt. So lassen sich die Sensoren leicht montieren und mit Hilfe eines Flachbandkabels eine ordentliche Verbindung zu PELWMSD herstellen.
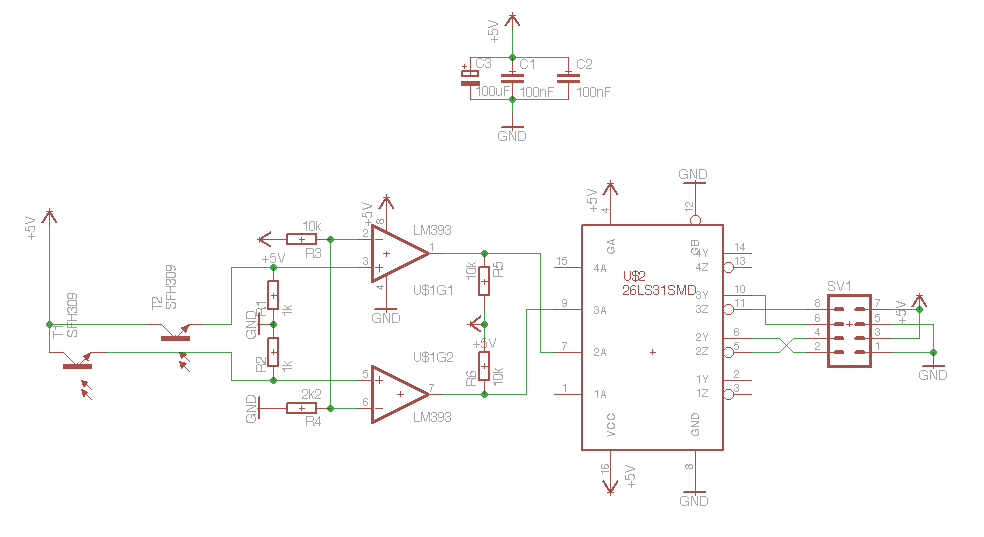
bei den weit entfernten Sensoren ist die Schaltung etwas aufwändiger. Dort wird das Signal direkt bei den Sensoren aufbereitet und mit Hilfe von Differential Treibern an PELWMSD weitergeleitet.
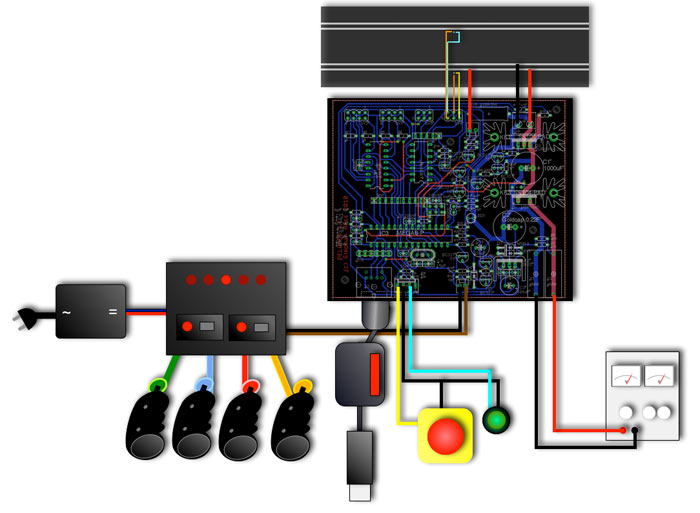
BB/CU Der Anschluss zur BB/CU erfolgt über JP1. Man trennt die Kabel, die aus der BB/CU kommen und zu den Fahrbahnleiter führen und verbindet sie stattdessen mit JP1. Das Kabel, das mit dem Leiter, der der BB/CU am nächsten war, führt die positive Spannung, das andere Kabel Masse. Das Kabel mit der positiven Spannung wird mit Pin 1 von JP1 verbunden, das andere Kabel mit Pin2. Bahnanschluss X4 wird mit den Fahrbahnleitern verbunden. Pin 2 mit dem Fahrbahnleiter (positive Spannung), der der BB/CU am nächsten ist. Pin 1 mit dem anderen. Bei hohen Strömen ist es wichtig, dass die Verbindungen möglichst kleine Widerstände aufweisen. Deshalb ist es wichtig, Kabel mit einem Querschnitt von zumindest 1,5mm2 zu verwenden. Auch die Verbindung zur Bahn muss einen so geringen Widerstand, wie möglich haben. Summt eine Anschlussstelle (oder Schiene) bei Stromfluss, so ist der Kontakt schlecht. Auch auf eine gute Stromverteilung auf der Bahn ist zu achten und ggf. Zusatzeinspeisungen anzubringen. Denn es nutzt nichts 16A liefern zu können, wenn die Spannung wegen zu hoher Bahnwiderstände zusammenbricht. Bahnfeedback und Dualmodus Das Bahn-Feedback hat zwei Aufgaben, zum einen Antworten von Pitstopadaptern und anderen Geräten zu lesen und zweitens Analog Betrieb zu erkennen. Dazu benötigt man ein Kabel von Pin 1 von JP3 zum im Digtalbetrieb positiven Fahrbahnleiter. Wenn man keinen Dualmodus plant, kann man Pin 1 von JP3 gleich mit Pin 2 vom Banhanschlussstecker (X4) verbinden. Bei Dualbetrieb muss er aber mit der Fahrbahn verbunden werden. Außerdem muss eine der Masseanschlüsse (z.B. Pin 2 von JP3) mit der negativen Spannung des Analog Netzteiles verbunden werden. Es kommt zusammen was zusammen gehört: Wenn man dann alles zusammen nimmt sieht das in etwa so aus:
Test Für den ersten Test genügt es nur das Netzteil an die 4mm Buchsen anzuschließen. Nach dem Einschalten sollte die Led blinken und bei einem Digitalauto mit eingeschaltetem Licht, sollte dies auch leuchten. Nun wieder Ausschalten und die BB/CU zusätzlich mit PELWMSD verbinden. Immer zuerst PELWMSD einschalten und erst ein paar Sekunden danach die BB/CU. PELWMSD braucht einen Moment um Festzustellen ob ein Pitlaneadapter vorhanden ist - und das muss er vor dem Einschalten einer CU wissen. Dann die BB/CU Einschalten. Ist eine eingeschaltete BB angeschlossen, so blinkt die Led weiter, ist aber länger an als aus, bei eingeschalteter und angeschlossener CU ist die Led länger aus als an. Ein Auto auf der Bahn sollte sich ganz normal steuern lassen. Konfiguration Die Konfiguration erfolgt, über die PC-Unit. Man verwendet dazu eine Terminalemulation wie Hyperterm. Die Befehle sind alle einfach, müssen aber mit einer gewissen Geschwindigkeit eingegeben werden. Am einfachsten ist es sie in Notepad o.ä. zu schreiben und mit Copy und Paste in die Terminalemulation zu kopieren. Die Konfiguration wird dauerhaft gespeichert. Ist die Konfiguration erfolgt, so wird die PC-Unit nur noch benötigt, wenn PELWMSD das Runden- und Zeitmanagement übernehmen soll. Die Beschreibung der Befehle und des Konfigurations- bzw. Updatevorgangs findet sich in dieser PDF Datei. Verwendet man einen PC, so muss man die Konfiguration mit Hyperterm durchführen, hat man einen Mac, so kann man dies mit iLap 1.3ß17 oder neuer machen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||