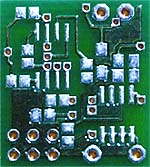 
Etwa in Originalgröße, 
Mut zur Lücke. 
Wenn man genau hinsieht, |
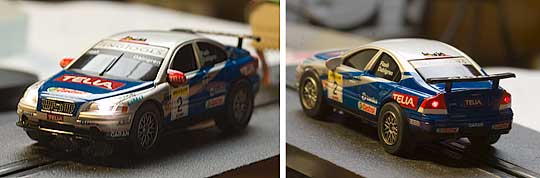
Stand der Dinge: 2008 Als Pro X Projekt ist das ganze durch die Einführung von D1xx am Ende. Allerdings lässt sich der Dekoder nach Software- und geringfügiger Hardware Anpassung inzwischen auch mit D1xx einsetzen. Gott sei Dank, denn ich habe noch reichlich Platinen rumliegen. Stand der Dinge: 1.3.2007 Wie peinlich, ich habe drei Tage an der "Störfestigkeit" gearbeitet um fetzustellen, dass der Schleifer im Auto keinen richtigen Kontakt hatte. Alle Panik umsonst. Stand der Dinge: 28.2.2007 Ich habe noch etwas Zeit in die "Störsicherheit" investiert und bin dabei einem Tip von Ralf Goldschmidt aka gora nachgegangen. Guter Tip, danke Ralf. Stand der Dinge: 27.2.2007 Auf Reichelt ist Verlass, die Teile sind gekommen. Der erste Exclusiv Umbau die gelbe Corvette C 6R. Der Dekoder verschwindet fast in dem riesigen Gehäuse. Vor allem nimmt er nicht einmal ein Viertel der Fläche der Exclusiv Lichtplatine ein. Jetzt noch den Exclusiv Ferrari und den GT40 von AutoArt Umbauen und racen. Ich meine natürlich Dekoder bei höheren Betriebsspannungen testen.
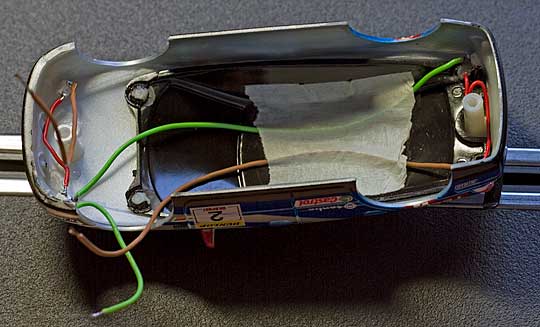
Stand der Dinge: 26.2.2007 Das Störproblem ist beseitigt. Jeweils 100 Runden mit vier verschiedenen Autos. Gott sei Dank. Ich erwarte morgen neue Bauteile und werde dann den erstes Exclusiv umrüsten. Stand der Dinge: 24.2.2007 Ohne Licht ist es nur halb so schön, deshalb hat der Carrera GO Volvo auch noch Licht bekommen. Und einen Quicktime Film dazu gibt es auch.
Es treten bei einigen Fahrzeugen Störungen auf, scheinbar abhängig vom Motor, und ich dachte schon ich sei so gut wie fertig :(
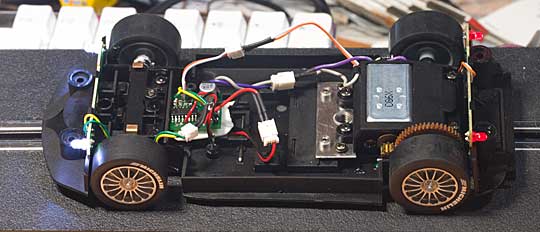
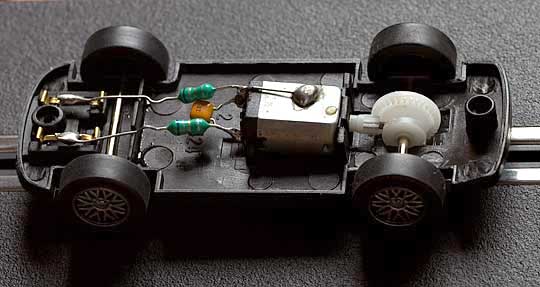
Jemand warf die Frage auf ob man GO Fahrzeuge auf ProX umrüsten kann. Man kann:
Die rote Led soll eigentlich zur Anzeige des Tankstandes dienen, aber die Windschutzscheibe ist wirklich lichtdicht. Ich werde sie gegen etwas superhelles ersetzten, so dass es aus den Radkästen scheint, wenn es Zeit zum Tanken ist (natürlich stottert das Auto auch, wenn der Tank leer ist). Das Fahrverhalten ist mit einem 1:32 er nicht zu vergleichen, da sind sich GO und ProX Fahrer einig, allerdings sind sie unterschiedlicher Meinung welches das bessere Fahrverhalten ist. Stand der Dinge: 18.2.2007 Ich habe die ID Umstellung ohne Programmierschiene implementiert. Sie funktioniert auch im laufenden Betrieb. Erfolgt kein Doppelclick so bleibt die eingestellte Adresse gültig. Doppelclicks von Reglern, die auch nur kurzzeitig gedrückt werden (Geschwindigkeit > 0) werden ignoriert. Ebenfalls neu implementiert, wurde das Umschalten der Fahrzeugbeleuchtung, wenn der Taster betätigt wird, während das Fahrzeug steht. Stand der Dinge: 12.2.2007 Die neuen Decoder sind noch einen Hauch kleiner 19 mm x 19 mm. Dadur passen sie auch in kleine Kofferräume.
Stand der Dinge: 11.2.2007 Die neuen Platinen sind gekommen und einer davon bestückt und getestet. Bei der Gelegenheit, habe ich die Software komplett umgestellt und auch einen neuen Master gebaut.
Die neue Masterplatine ist etwas kleiner, hat aber dafür zusätzlich einen USB Anschluss und einen Anschluss für einen IR Sensor, so dass sie Daten vom Auto abfragen kann. Ausserdem wird darüber sichergestellt, dass Daten die ans Auto gesendet werden auch ankommen. Über den USB Anschluss kann man alle Einstellungen vornehmen, die über den Master möglich sind und zusätzlich kann man neue Software in den Dekoder downloaden und die Geschwindigkeitskurve des Autos beliebig einstellen.
Stand der Dinge: 3.2.2007 Die ersten 1000 fehlerfreien Runden sind absolviert. Ich wage zu behaupten, dass die Rundenzählung funktioniert. Zum Test habe ich ein Auto mit meinem Controller und einem Carrera Leitkiel (mit einer anderen Id) fahren lassen und einfach die gezählten Runden verglichen und siehe da, identisch. Zieldurchfahrt Einziger Nachteil: Ist direkt hinter dem Runmdenzähler eine Weiche, so schaltet sie immer. Ich weiss woran es liegt, kann es also abstellen. Aber zuerst werde ich weitere Autos umrüsten und aus Jux das Digital132 Dreiclick FahrId Zuweisungs Feature einbauen. Ich sehe allerdings potentielle Probleme, wenn jemand sein Auto aufstellt und gerade bevor er mit den Dreiclicks beginnt ein zweiter Fahrer sein Auto, das die Fahrbahn verlassen hatte, wieder einsetzt. Dann hat man plötzlich zwei Autos mit der gleichen Id. Aber Versuch macht kluch. Stand der Dinge: 29.1.2007 Ich habe 250 Platinen für die Fahrzeug Dekoder in Auftrag gegeben. Die Größe eines Dekoders beträgt 1,92 cm * 1,93 cm * 0,9 cm. Dann kann bald das große Umrüsten beginnen. Inzwischen habe ich an der Schaltung für Rundenzählung und Zeitmessung ohne modifizierten Leitkiel gearbeitet. Diese läuft nun im Labor und geht in die Testphase.
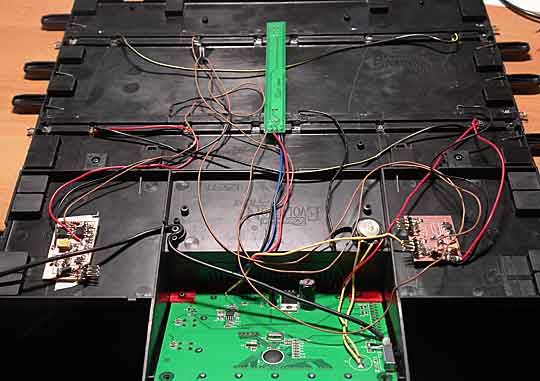
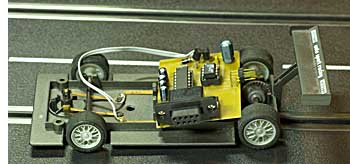
Hier im Bild ist die Schaltung noch auf zwei Platinen aufgeteilt. Sie ist so leichter zu testen und zu modifizieren. Die Fahrzeuge geben ihre Kennung über die Weichensteuerungs IR-Led bekannt und die Elektronik erzeugt daraus ein Signal, das dem, das der Fototransistor bei einer Unterbrechung durch einen gelochten Leitkiel erzeugt, entspricht. Um völlige Kompatibilität mit den Original Fahrzeugen zu gewährleisten wird auch das Signal von der Leitkiel-Lichtschranke auf die Platine geführt und vom Controller verarbeitet und an die Zeitmessung weitergeleitet. Stand der Dinge: 16.1.2007 Man kann durch das Anbringen von Schlitzen in Standard Leitkielen diese so kodieren, dass der Carrera Rundenzähler die Fahrzeuge erkennt.
Das Bild zeigt die Platine in einem TVR 400 von Scalextric. Die Platine liegt nur zu Vergleichszwecken. Im Betrieb steht sie leicht schräg neben dem Motor. Die Controller unterstützen alle Funktionen eines geregelten Fahrzeuges. D.h. Geschwindigkeit, Spurwechsel und Tankfunktion. Das Ein/Ausschalten von Licht und Bremse, und die Adresswahl erfolgen ohne DIP Schalter mittels der Programmierschiene. Das Warnblinken bei fast leerem Tank erfolgt auch mit den Frontscheinwerfern. Zum einem weil es besser wahr genommen wird und zum anderen weil einige Fahrzeuge keine Heckscheinwerfer haben. Die Controller können mittels der Programmierschiene komplett neu programmiert werden ohne, dass das Fahrzeug aufgeschraubt werden muss. Dies erlaubt nachträgliche Änderungen und Erweiterungen. Es besteht die Möglichkeit den Fahrstufen im Controller über die Programmierstufe unterschiedliche Werte zuzuweisen. Eine typische Anwendung ist das beschränken der Geschwindigkeit für Kinder oder ein feinfühligeres Regeln im unteren oder oberen Bereich.
Bald: Option für unterschiedliche Beschleunigung und/oder Höchstgeschwindigkeit in Abhängigkeit von der gegenwärtigen Spritmenge. Und irgendwann einmal (weil es mich momentan nicht interessiert): Der Hintergrund Anfang 2006 habe ich mir ein Carrera Pro X Set zugelegt. Alles in Allem funktioniert das System sehr gut, allerdings ist ein gemischter Betrieb von analog und digital Fahrzeugen nicht möglich. Nun findet man im Web verschiedene Tips, wie man Weichen und Stromversorgung modifizieren muss, damit man wechselweise digital und analog fahren kann. Ich entschloss mich hingegen ganz auf digital um zu steigen. Nun stellt sich die Frage, wie man all die analogen Autos auf digital umrüstet ... Also muss ein Controller her, der klein genug ist um in ein Slotcar zu passen und mit der Pro X Elektronik kompatibel ist. Es war von vorne herein klar, dass das Ziel nur mit einem Microprozessorsystem zu erreichen ist. Welche Anforderungen muss es erfüllen ?
Zu diesem Zeitpunkt lassen sich schon erste Aussagen über die Anzahl der benötigten Anschlüsse des Prozessors treffen.
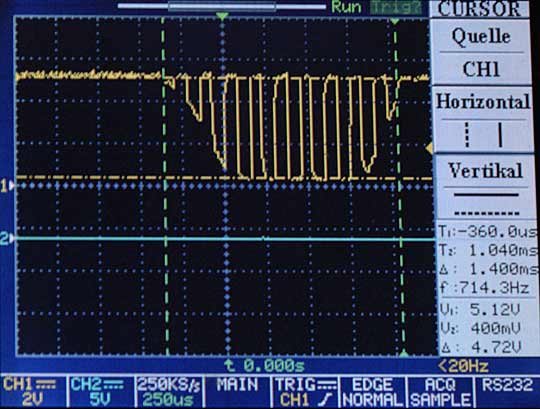
Das macht 8 Pins. Prozessoren mit 8 Pins gibt es, allerdings muss man dann einen Prozessor wählen, der keine weiteren Anschlüsse für die Takterzeugung und Reset oder andere Steuersignale benötigt. Ausserdem muss ich dann auf die Schalter für Licht und Fahrzeugadresse verzichten. Um platz zu sparen, mache ich genau das. Es wird keine Schalter geben und ich wähle einen Prozessor, der ohne externe Steuersignale auskommt. Wie geht es nun weiter ? Der erste Schritt ist es heraus zu finden, wie Energie und Daten an die Autos übergeben werden. Mit Hilfe eines Oszilloskops ist dieser Schritt leicht getan. Genau genommen gibt es beim pro X System keine Versorgungsspannung, konzeptionell gibt es nur einen seriellen Zweidraht Bus, dessen Treiber stark genug sind die Autos zu versorgen. Im Ruhezustand liegt eine Spannung an, die die Fahrzeuge als Versorgungsspannung verwenden. Die aktiven Datenübertragungen sind entsprechend selten und kurz, so dass die Trägheit des Autos diese "Aussetzer" überbrückt. Die Elektronik im Auto reagiert da schon empfindlicher und deshalb wird die Versorgungsspannung für die Elektronik mit einer Diode von der Fahrbahn entkoppelt und die "Aussetzer" mittels eines Kondensators überbrückt. Nun stellt sich die Frage wie die Aussetzer zusammen gehören und auf welche Art und Weise sie Bits und Datenworte bilden. Die erste Analyse erfolgt wieder mit dem Oszilloskop. Man kann recht leicht die physikalischen Parameter, Anzahl der Bits, Kodierverfahren, Frequenzen, und Spannungspegel, ermitteln. Diese Informationen genügen um die Anbindung des Prozessors an die Fahrbahn zu entwerfen. Die Anbindung an Motor und Leds ist Standard und Bedarf keines echten Entwicklungsaufwandes. Die Hardware ist zu diesem Zeitpunkt im wesentlichen fertig. Aber um die Software schreiben zu können fehlen wichtige Informationen über das verwendete Datenprotokoll.
Nun weiss man welche Bitfolgen, welche Geschwindigkeiten oder das Einschalten der Infrarot Led zur Folge haben. Das genügt um ein Programm zu schreiben, dass den Controller zum Leben erweckt und aus einem normalen Slotcar ein Pro X Fahrzeug macht.
|





 Die Schaltung der SMD-Controller und die Programmierschiene sind fertig und getestet.
Die Schaltung der SMD-Controller und die Programmierschiene sind fertig und getestet.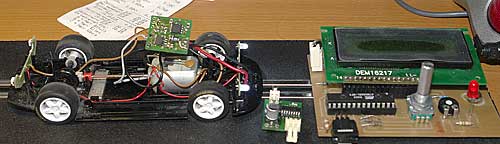
 Für die Analyse des Datenprotokolls also welche Bitkombinationen welche Bedeutung haben ist das Oszilloskop schlecht geeignet. Deshalb habe ich einen alten SCX Ferrari geopfert und zum Messwagen umgebaut. Ein Microprozessor ausgestattet mit der Schaltung zu Anbindung an die Fahrbahn wartet auf "Aussetzer" und macht aus ihnen Bits, fasst sie zu Datenworten zusammen und schickt sie über eine RS232 Schnittstelle an einen Rechner. Am Rechner kann man sich nun in Ruhe anschauen, welche Bitfolgen bei welchen Ereignissen bzw. Reglerstellungen auftreten.
Für die Analyse des Datenprotokolls also welche Bitkombinationen welche Bedeutung haben ist das Oszilloskop schlecht geeignet. Deshalb habe ich einen alten SCX Ferrari geopfert und zum Messwagen umgebaut. Ein Microprozessor ausgestattet mit der Schaltung zu Anbindung an die Fahrbahn wartet auf "Aussetzer" und macht aus ihnen Bits, fasst sie zu Datenworten zusammen und schickt sie über eine RS232 Schnittstelle an einen Rechner. Am Rechner kann man sich nun in Ruhe anschauen, welche Bitfolgen bei welchen Ereignissen bzw. Reglerstellungen auftreten. Aber eins fehlt noch: das Einstellen der Fahrzeugadresse und der Sonderfunktionen. Da ich keine Schalter zur Verfügung habe, verwende ich eine Programm Schiene. Auf ihr befindet sich ein kleines Prozessorsystem. Über einen Dreh- und Drückschalter wählt man durch Drehen die gewünschte Option und drückt ihn dann um die Funktion im Auto einzustellen. Das nebenstehende Bild zeigt die Programmschiene und den Laster mit dem Controllerprototypen.
Aber eins fehlt noch: das Einstellen der Fahrzeugadresse und der Sonderfunktionen. Da ich keine Schalter zur Verfügung habe, verwende ich eine Programm Schiene. Auf ihr befindet sich ein kleines Prozessorsystem. Über einen Dreh- und Drückschalter wählt man durch Drehen die gewünschte Option und drückt ihn dann um die Funktion im Auto einzustellen. Das nebenstehende Bild zeigt die Programmschiene und den Laster mit dem Controllerprototypen.