|
Dezember 2019 Carrera hat eine neue Version seines D132 Decoders auf den Markt gebracht und es gibt Kompatibilitätsprobleme. Das Symptom: Sie Speedeinstellung über die CU liefert andere Regelkurven als vorher und die Höchstgeschwindigkeit ist bei vielen Speedeinstellungen gleich - nämlich volles Vollgas. Es kursieren viele Theorien woran das liegt, hier ein Versuch der Aufklärung. Die Geschwindigkeit des Fahrzeugs ergibt sich aus der Drehzahl des Motors, diese ergibt sich aus der am Motor anliegenden Spannung. Die Spannung wird allerdings nicht analog geregelt, sondern über eine PWM gesteuert. Das ist ähnlich wie im Kino, man hat dort keine bewegten Bilder, sondern Standbilder die so schnell wechseln, dass es für uns wie bewegte Bilder aussieht. Die PWM schaltet den Motor so schnell an und aus, dass wir kein Ruckeln mehr wahrnehmen und je nach dem wie lange der Motor an und aus ist, dreht der Motor schneller oder langsamer. Wie lange der Motor an oder aus ist, bestimmt der Decoder. Er hat als Vorgaben die Speedeinstellung und die Reglerstellung. Anhand der beiden Werte wird nun die An-Dauer für die PWM bestimmt. Sind zum Beispiel die Speed 1 und der Regler durchgedrückt, so ist das PWM Signal 30% der Zeit an. Im Idealfall läuft der Motor dann mit 30% seine maximalen Drehzahl. Wenn man sich den neuen blauen Decoder anschaut stellt man fest, dass der Prozessor eines anderen Herstellers verwendet wird. Die Firmware musste also für diesen Prozessor angepasst werden. Eine gute Gelegenheit die Tabelle zu ändern. Also los.
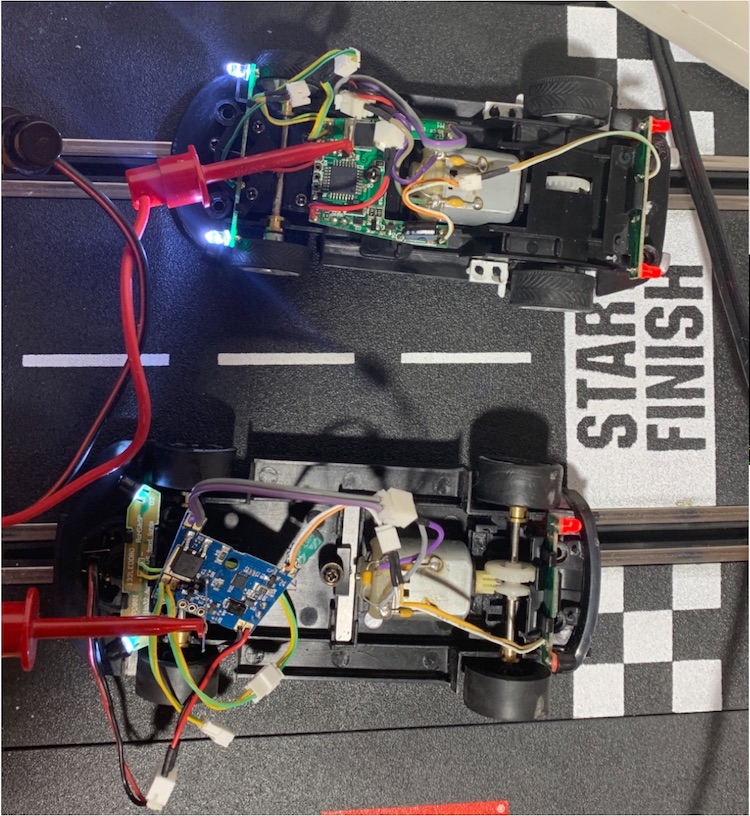
Der Testaufbau: Autos mit einem grünen und einem blauen Decoder. Je eine Messtrippe am PWM Ausgang des Prozessors. Ich habe jeweils Vollgas bei Speed 5 und Speed 1 gemessen.
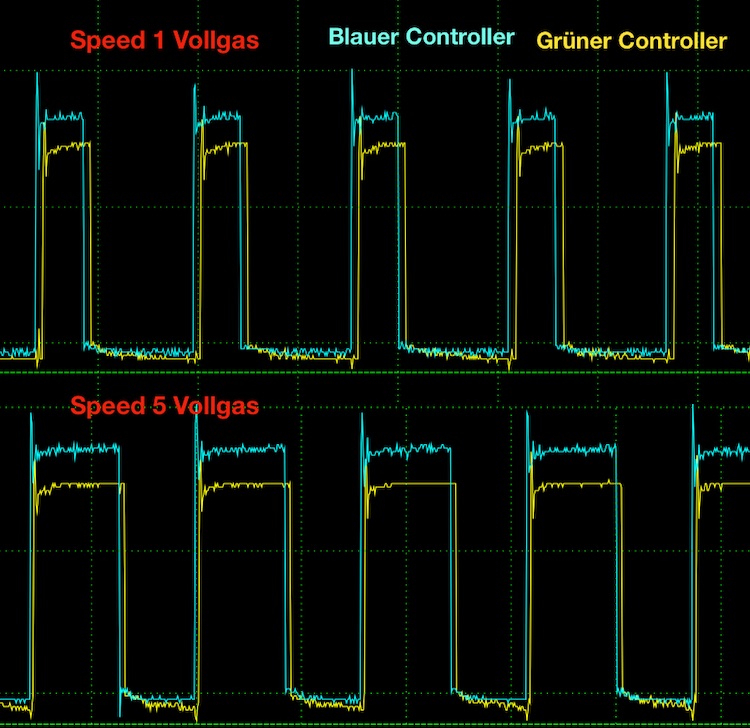
Wie sie sehen, sehen sie nichts. Die PWM Signale, sind bei beiden Decodern gleich - daran liegt es nicht. Der Prozessor kann weder die Spannung noch den Strom schalten, die für den Betrieb des Motors notwendig sind. Deshalb befinden sich zwischen Motor und Prozessor ein Mosfet und ein Transistor. Der Mosfet ist der, der die Arbeit macht. Er verwendet Spannungen mit denen der Prozessor nicht zurechtkommt, der Transistor nimmt die "Anpassung" vor. Die Mosfets sind andere als die auf dem alten grünen Decoder. Ganz vereinfacht gesagt hat der Mosfet einen Eingang (Source), einen Ausgang (Drain) und einen Steuereingang (Gate). In unserem Fall muss die Spannung am Gate um einen bestimmten Betrag unter die Spannung am Eingang fallen, damit die Spannung am Eingang zum Ausgang - und damit zum Motor - durchgeschaltet wird. Im Idealfall wäre die Spannung am Ausgang gleich dem Signal am Steuereingang, dass idealerweise dem invertierten PWM Signal entspricht. Invertiert weil das PWM Signal einen hohen Pegel hat, wenn der Motor laufen soll, aber der Steuereingang einen niedrigen Pegel haben muss, damit der Mosfet schaltet. Schau' ma mal.
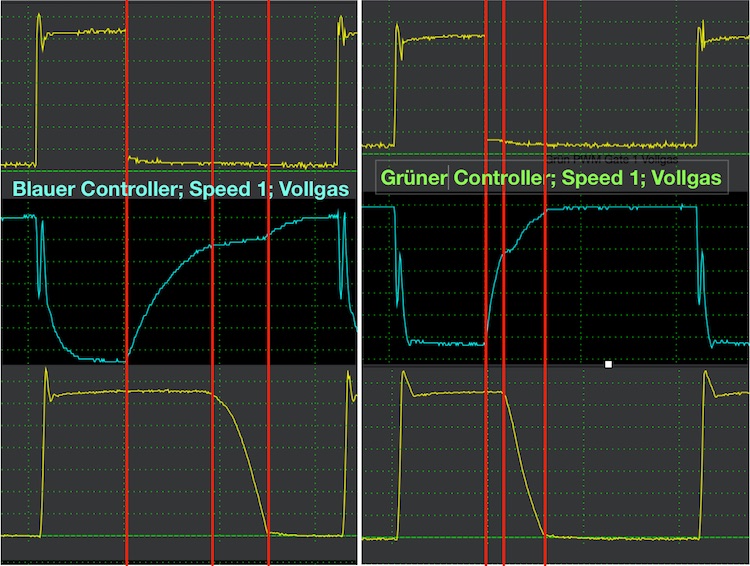
Auf der linken Seite die Signale des blauen Decoders, auf der rechten Seite die des grünen Decoders. Ganz oben das PWM Signal, dass bei beiden Decodern identisch ist. Darunter das Signal am Gate (Steuereingang) des Mosfet. Im Idealfall ist dies das Invertierte vom PWM Signal. Man sieht, dass
In Zahlen PWM Signal 30% an. Steuersignal beginnt zu steigen bei 30%, Motorspannung beginnt zu sinken beim grünen Decoder nach 35%, beim blauen Decoder bei 56%. Motorspannung erreicht 0V beim grünen Decoder nach 48%, beim blauen Decoder bei 75%. Man sieht dass der Motor beim blauen Decoder bei gleichem PWM-Signal länger läuft. Man kann sich nun Vorstellen, dass bei längeren PWM Phasen (hohe Speed Einstellung) das Abschalten des Motors, so spät erfolgt, dass es keine Auswirkung mehr hat, bevor der Motor wieder eingeschaltet wird. Zum Beleg:
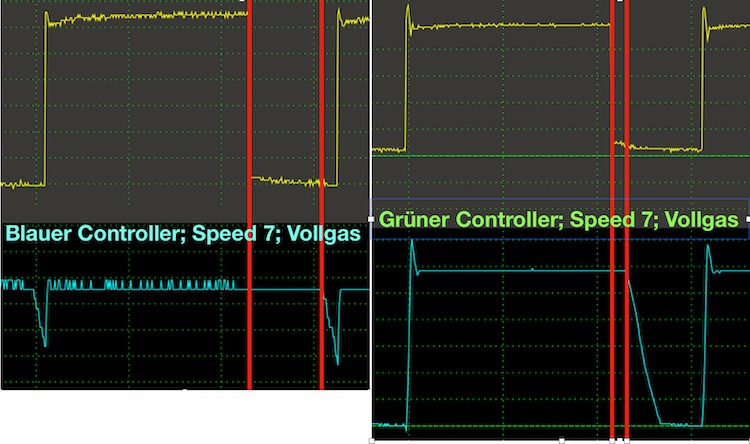
Bei Speed 7 und Vollgas schaltet der Mosfet des blauen Decoders so spät, dass es keinen Unterschied macht ob er schaltet oder nicht. Der grüne Controller hingegen schaltet bei gleichem PWM-Signal früh genug. In Zahlen PWM Signal 70% an. Steuersignal beginnt zu steigen bei 70%, Motorspannung beginnt zu sinken beim grünen Decoder nach 75%, beim blauen Decoder bei 94%. Motorspannung erreicht 0V beim grünen Decoder nach 87%, beim blauen Decoder gar nicht. Man sieht, dass die Verzögerungen zwischen den PWM- und Motorsignalen im Rahmen der Messgenauigkeit in beiden getesteten Fällen identisch sind. Woran liegt es ? Die Ansteuerung des Mosfet ist bei beiden Decodern gleich. das PWM-Signal ist auch gleich. Das schiebt dem Mosfet den Schwarzen Peter zu. Man sieht, dass das Gate Signal beim blauen Decoder langsamer steigt und somit die Schaltspannung später erreicht. Die ist ein Indiz dafür, dass die Eingangskapazität des Mosfets auf dem blauen Decoder höher ist. Was tatsächlich auch der Fall ist. Die Verzögerung beim blauen Decoder ist etwa 5 mal so lang, wie die beim grünen Decoder. Ein Teil davon lässt sich über die Eingangskapazität erklären. Eine weitere Komponente dürfte sein, dass der neue Mosfet eine geringe Gate Threshold Spannung hat. Das ist der Spannungsunterschied zwischen Source und Gate, bei dem der Mosfet schaltet. D.h. der neue Mosfet schaltet erst später ab. Und jetzt ? Carrera könnte die Firmware ändern, so dass die PWM Signale entsprechend verkürzt werden um die Verzögerung auszugleichen. Oder sie könnten die Ansteuerung des Mosfet ändern. Letzteres wäre IMHO die "bessere" Lösung, aber eine Hardware Änderung ist viel aufwändiger als eine Softwareänderung.
|
|